My name is Yiming Li. I am a final-year PhD student in the Robot Learning & Interaction group at the Idiap Research Institute and École Polytechnique Fédérale de Lausanne (EPFL), supervised by Dr. Sylvain Calinon.
I work on learning representations for robotics to enable robust robot manipulation in unstructured environments. A central challenge is to learn representations that support reasoning, efficiency, and generalization for real-world deployment. My research spans robot learning, computer visoin, motion planning, and optimization, with three focus areas:
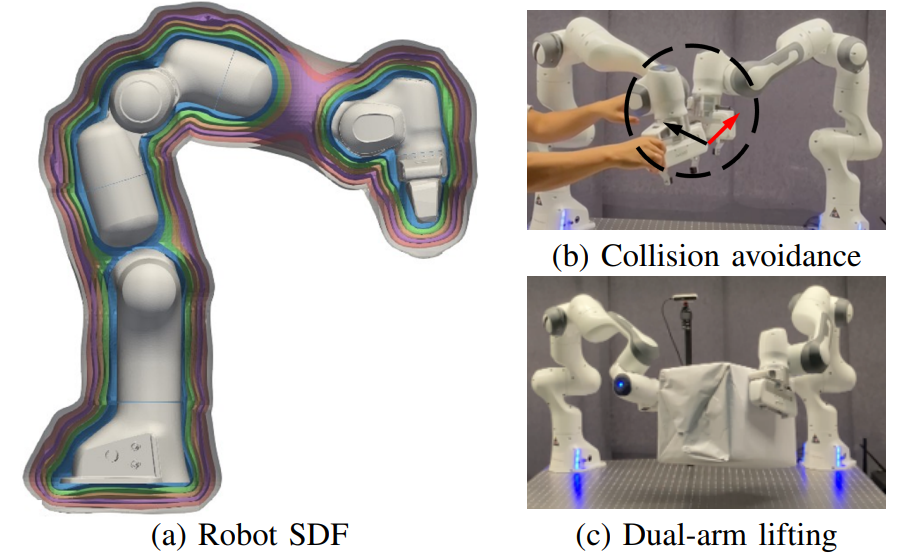
- Spatial reasoning (ICRA’24, RSS’24): Real-world manipulation is inherently 3D, so spatial understanding is critical for transferring skills across new objects, layouts, and interactions.
- Geometry-aware decision-making (RAL’25, ICLR’26, IJRR’26): Robotics is inherently geometric, and leveraging geometric structure is essential for fast, stable, and deployable decisions.
- Multimodal learning (RAL’22, ICRA’22, IROS’21): Multimodality is essential for robot manipulation tasks because it grounds semantics and affordances and connects naturally to language-conditioned decision-making.
I am on the job market, primarily seeking research scientist positions and postdoctoral opportunities. Feel free to reach out!
🔥 News
-
2026.01: Geometry-aware Policy Imitation - accepted to ICLR 2026. See you in Rio de Janeiro!
-
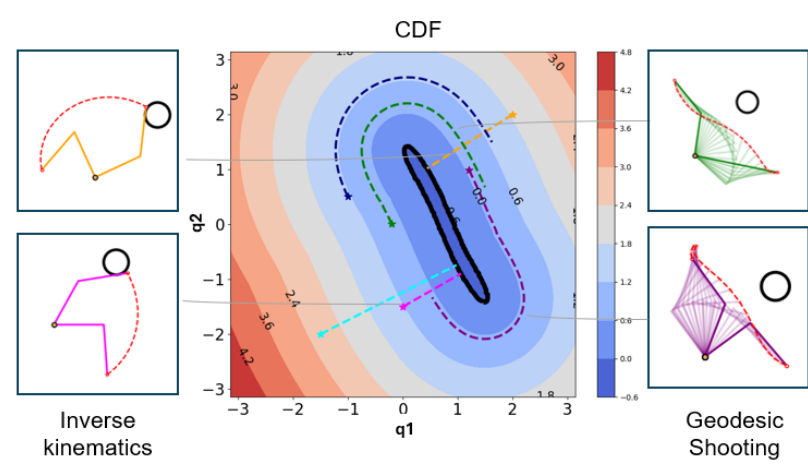
2026.01: A Riemannian Take on Distance Fields and Geodesic Flows in Robotics - accepted to IJRR
-
2025.07: From Movement Primitives to Distance Fields to Dynamical Systems - accepted to RAL. See you in Vienna!
-
2024.07: Configuration space distance fields - Best Paper Award Finalist at RSS 2024!
-
2024.05: Configuration space distance fields accepted to RSS 2024
-
2024.04: Online learning signed distance fields accepted to RA-L
-
2024.01: Robot geometry as distance fields accepted to ICRA 2024
📝 Selected Publications
Please visit my Google Scholar page for full publications.
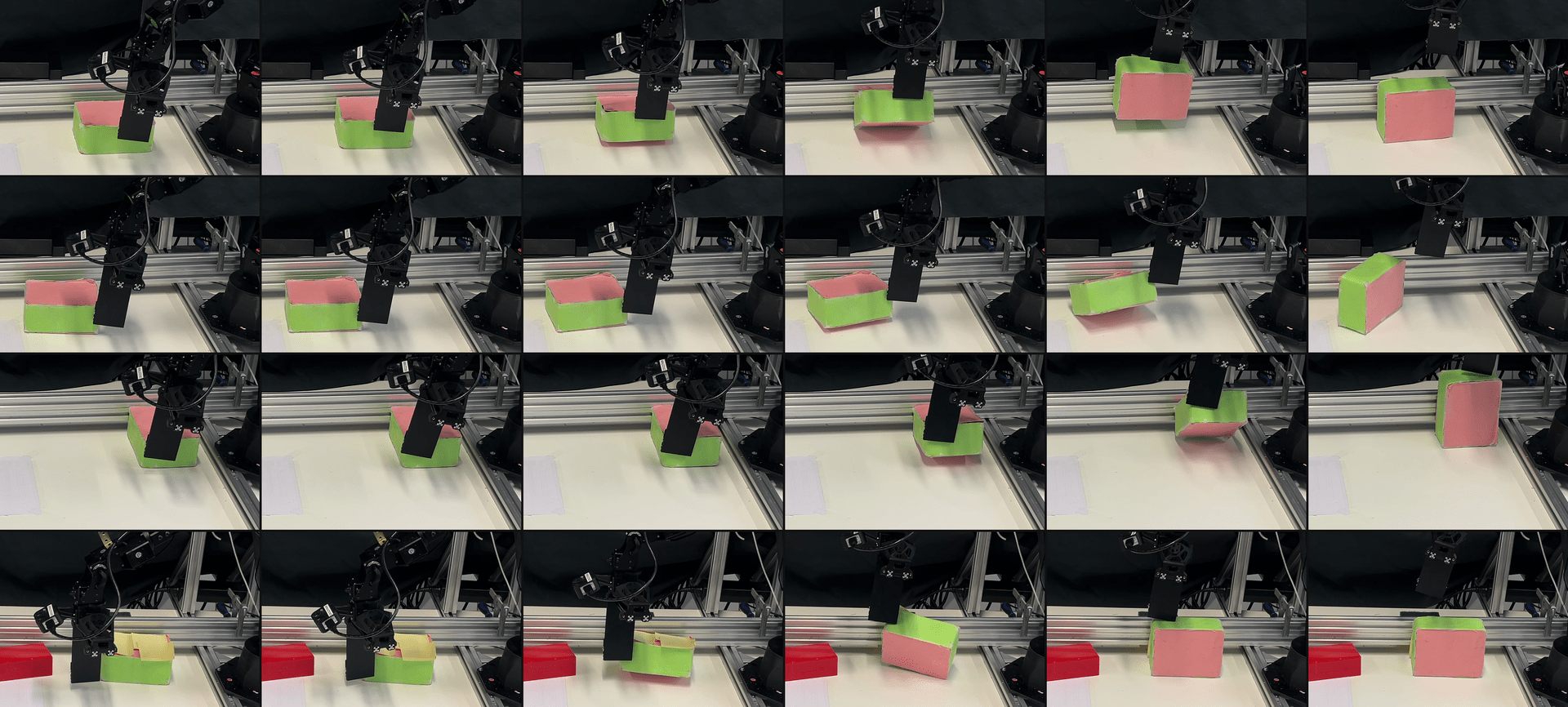

From Movement Primitives to Distance Fields to Dynamical Systems
Yiming Li and Sylvain Calinon
IEEE Robotics and Automation Letters (RA-L).
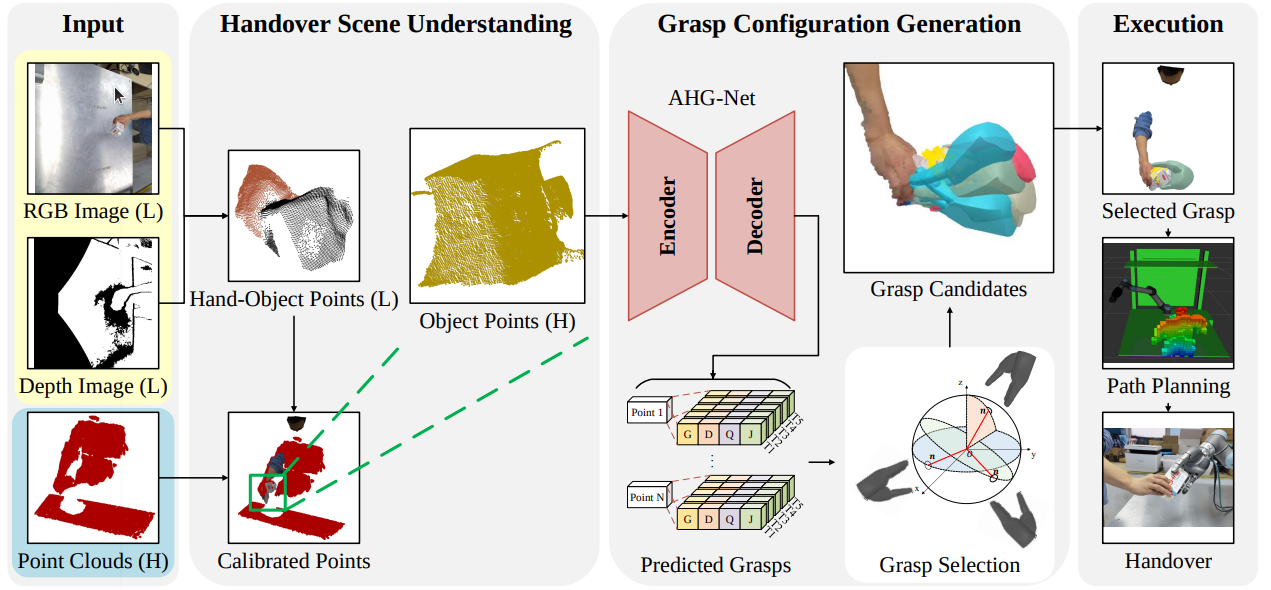
Learning Human-to-robot Dexterous Handovers for Anthropomorphic Hand
Hoanan Duan, Peng Wang, Yiming Li, Daheng Li, Wei Wei
IEEE Transactions on Cognitive and Developmental Systems(T-CDS) 15 (3), 1224-1238.
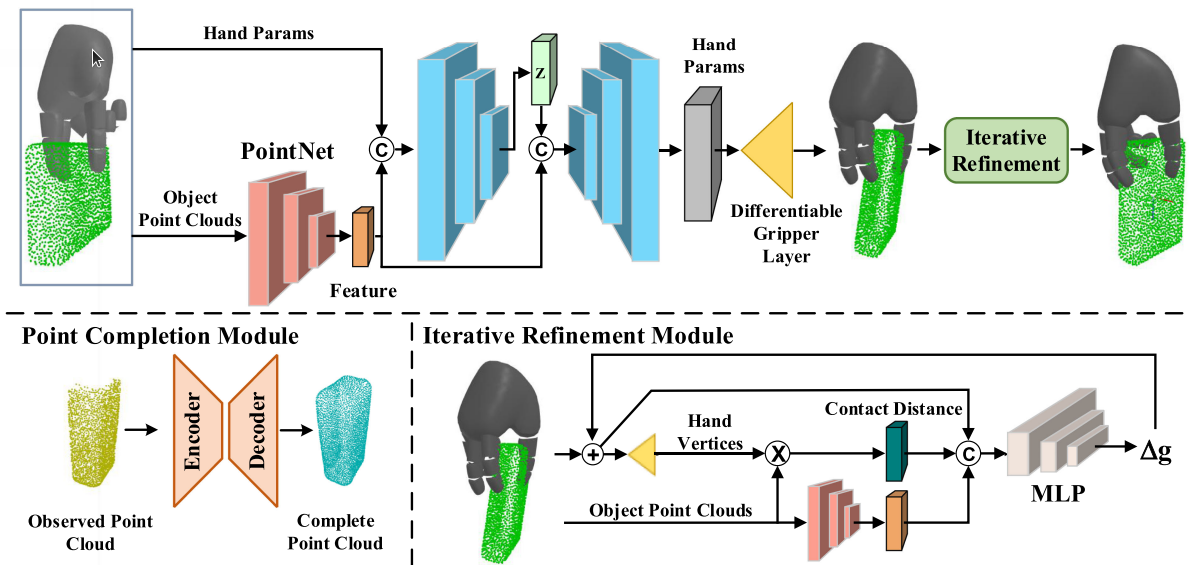
DVGG: Deep Variational Grasp Generation for Dextrous Manipulation
Wei Wei, Daheng Li, Peng Wang, Yiming Li, Wanyi Li,Yongkang Luo, Jun Zhong
IEEE Robotics and Automation Letters (RA-L) 7 (2), 1659-1666.
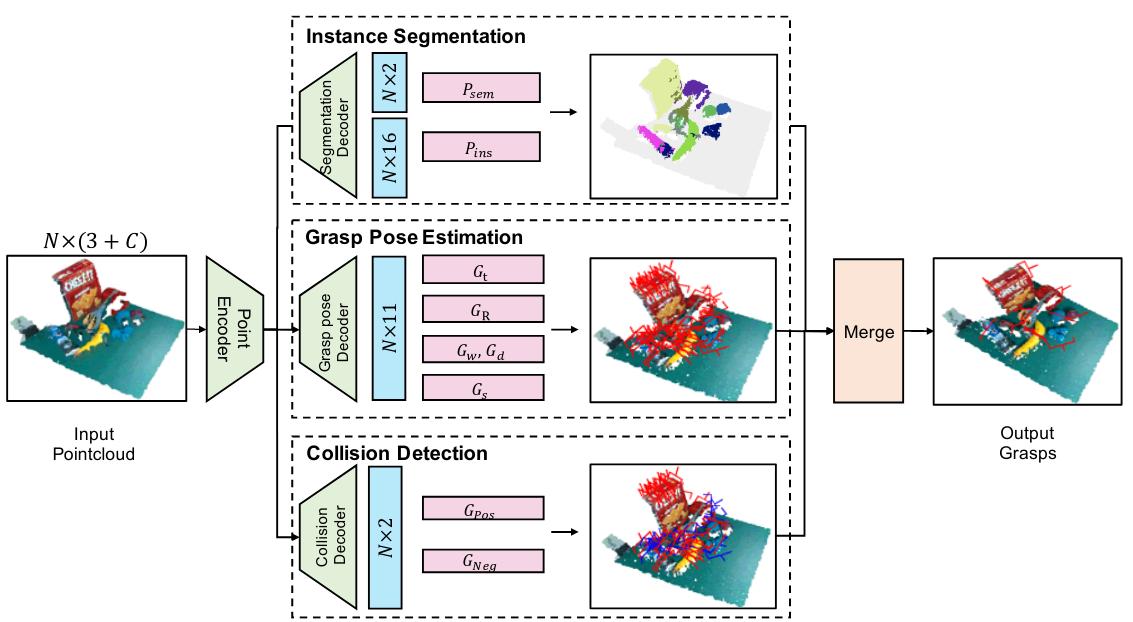
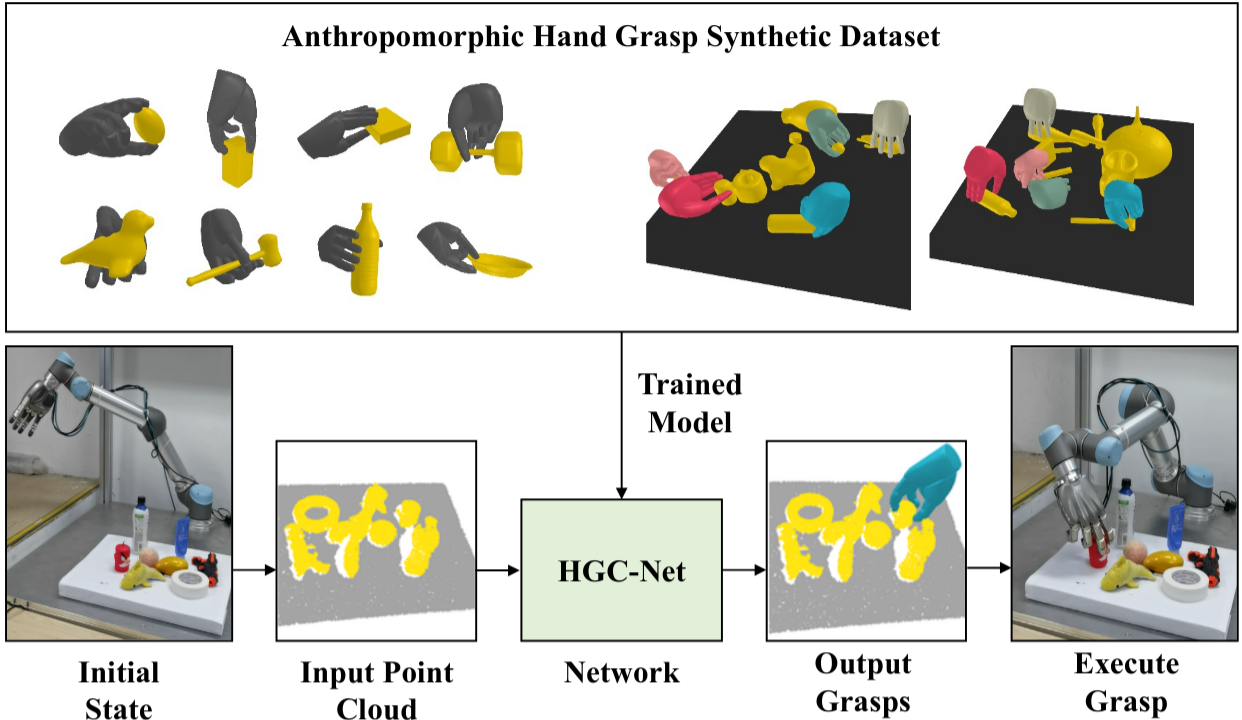
Simultaneous Semantic and Collision Learning for 6-dof Grasp Pose Estimation
Yiming Li, Tao Kong, Ruihang Chu, Yifeng Li, Peng Wang, Lei Li
In Proc. IEEE/RSJ Intl Conf. on Intelligent Robots and Systems 2022 (IROS 2022).
📖 Educations
- 2022.10 - now, École Polytechnique Fédérale de Lausanne (EPFL), Lausanne, Switzerland.
- 2019.06 - 2022.06, Institute of Automation, Chinese Academy of Sciences, Beijing, China.
- 2015.09 - 2019.06, Tongji University, Shanghai, China.
📞 Contact
- Email: ymli.cn@gmail.com
- Telephone: (+41) 77 278 38 48
- Address: Idiap Research Institute, Centre du Parc, Rue Marconi 19, CH-1920 Martigny, Switzerland