Abstract
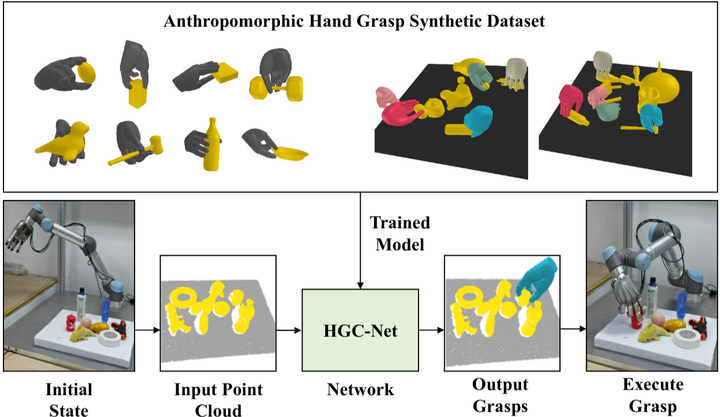
Grasping in cluttered environments is one of the most fundamental skills in robotic manipulation. Most of the current works focus on estimating grasp poses for parallel-jaw or suction-cup end effectors. However, the study for dexterous anthropomorphic hand grasping in clutter remains a great challenge. In this paper, we propose HGC-Net, a single-shot network that learns to predict dense hand grasp configurations in clutter from single-view point cloud input. Our end-to-end neural network can predict hand grasp proposals efficiently and effectively. To enhance generalization, we built a large-scale synthetic grasping dataset with 179 household objects, 5K cluttered scenes and over 10M hand annotations. Experiments in simulation show that our model can predict dense and robust hand grasps and clear blackover 78% of unseen objects in clutter without any post-processing and outperform baseline methods by a large margin. Experiments on the real robot platform also demonstrate that the model trained on synthetic data performs well in natural environments.